Übergordnete Werke und Veranstaltungen
MASS (Multiple A.I. Social Simulation)
Personen
Media
MASS

MASS


Anne Nigten
JULIO SOTO & SCOTT PETILL, MASS (Multiple A.I. Social Simulation)
Die Kunst der Zweckfreiheit
Als Respondentin des Projektes MASS möchte ich meine Überlegungen, Assoziationen und einige wichtige Ideen aus den Gesprächen mit Julio Soto (ES) und Scott Petill (US), den Produzenten von MASS, darlegen.
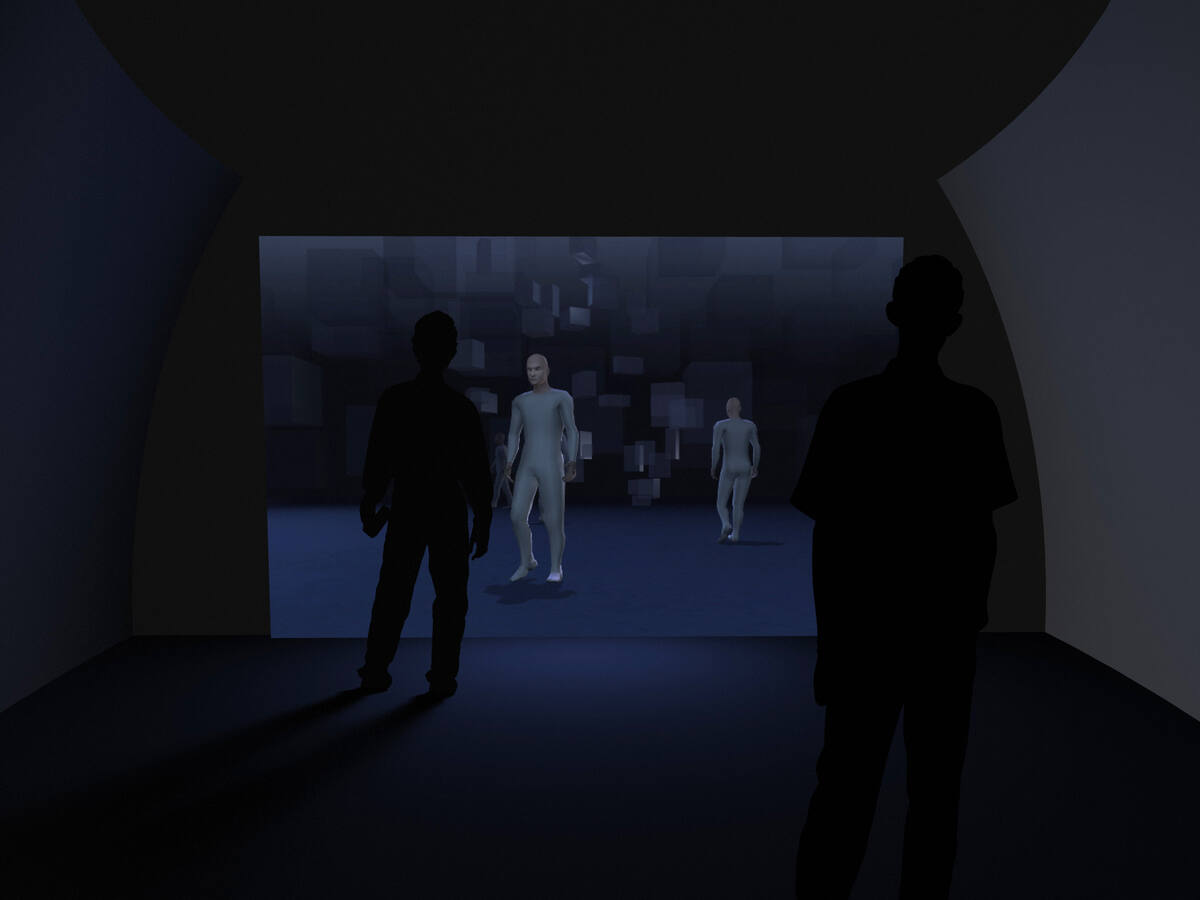
Ich besuchte die MASS-Website, noch bevor ich mit den Künstlern gesprochen habe.1 Hier fand ich eine Beschreibung ihrer Arbeit, einen ersten Referenzpunkt, der die Richtung meiner Recherche bestimmte. Mein erster Blick auf die Dokumentation des MASS-Projektes erinnerte mich an einen Zoo. Warum? Erstens wird in einem früheren Setup von MASS2 – angesichts des Publikums, das sich vor einer großen Leinwand versammelt – die Verbindung zum Zoo ganz deutlich, wo die Besucher sich vor einem Käfig einfinden, um bei den eingesperrten Tieren eine Reaktion zu provozieren oder gar in Interaktion mit ihnen zu treten. In diesem Falle treten die Avatare, jene fiktionalen Charaktere, welche die virtuelle Welt bevölkern, an die Stelle der Tiere. Man erkennt sofort, dass die Künstler den Avataren semi-autonomes Verhalten zugestehen. Diese Beobachtung stützt sich hauptsächlich auf das Verhalten des Publikums. Es gibt in der Installation kein Eingabegerät, sodass der Besucher andere Mittel finden muss, um mit den Avataren „in Kontakt zu treten“. Für eine erfolgreiche Kontaktaufnahme werden die Besucher ermuntert, auf althergebrachte Interaktionsszenarien aus dem echten Leben zurückzugreifen, wie zum Beispiel auf jenes, das mit Erinnerungen an die Kindheitsbesuche im Zoo verbunden ist. Zweitens erinnerte mich das Setup an das „Wer beobachtet wen?“-Szenario, das ineinander verschränkte und dauerhafte Wechselspiel zwischen Antagonist und Protagonist. In Bert Haanstras (NL) Film Ape and Super-Ape (1972)3 gibt es frappierende Verweise auf diese Spiegelungen. Für diesen Film arbeitete Haanstra mit einem Verhaltensforscher, um auf manchmal urkomische Weise die zutiefst philosophische Frage nach den Ähnlichkeiten und Unterschieden zwischen Menschen und (wilden) Tieren zu veranschaulichen. Als abschließende Überlegung zur Zoo-Assoziation möchte ich den Aspekt der Zweckfreiheit der Installation erwähnen: Denn obgleich wir zu Erkenntnissen kommen können, die unser eigenes Verhalten betreffen, ist doch der interessanteste Aspekt der Arbeit ihre Zweckfreiheit – im Sinne einer nicht-funktionalen Aktivität, wie eben ein Zoobesuch – und ihr spielerisches Potenzial. Das ist eine spannende Antwort auf den aktuellen Trend zu einer angewandten bzw. „nützlichen“ Kunst, insbesondere jetzt in einer Phase der ökonomischen Rezession, in der der ökonomische Nutzen als Bewertungsgrundlage vorherrschend scheint.4
Das Interaktions- und Verhaltensszenario von MASS ruft eher Gefühle und Verhaltensänderungen hervor, als Gefühle per se zu produzieren. Mit anderen Worten: Es ist das Publikum, welches das ziemlich minimale, tierische Verhalten der Avatare „erfühlt“ und interpretiert. Dies knüpft an die anhaltende Diskussion um Gefühle und künstliches Leben bzw. künstliche Intelligenz an. So wie ich es verstehe, basiert diese Debatte auf dem Wunsch oder dem Glauben, dass Roboter oder Avatare Gefühle „haben“ müssen, obwohl sie – bisher – nur begrenzt Gefühle zeigen oder auf die Gefühle anderer reagieren können: Der Weg, den es zu beschreiten gilt, bis sie eigene Gefühle entwickeln können, ist lang. Trotz alledem verfolgt die wissenschaftliche Forschung kontinuierlich eine beeindruckende Bandbreite von Projekten, die in den vergangenen Jahren in den Feldern der Kunst und Technologie entwickelt wurden, um dieser Frage nachzugehen. Diese Projekte experimentieren mit aktiver Einbindung, „So-tun-als-ob“ oder mit Spiegelszenarien, die auf das Hervorrufen von Publikumsreaktionen abzielen. Solche künstlerischen Experimente hatten ihren ersten Höhepunkt und ihre Ruhmestage in den frühen 1990ern.
An dieser Stelle möchte ich Sie auf eine kleine Zeitreise in die Vergangenheit mitnehmen, bevor ich zu MASS zurückkehre. In einem Interview mit Nick Baginski, das Josephine Bosma (in Reaktion auf einige Veranstaltungen im V2_ Institute for the Instable Media) über den Nettime E-Mail-Verteiler 1997 veröffentlichte, erklärt Baginski, dass er eine Gruppe behinderter Roboter entwickelt hat in eindeutig provokativer Absicht: „Es geht nicht darum, dass sie erfolgreich sind. Es geht darum, dass sie irgendeine Art emotionaler Reaktion hervorrufen, Mitleid zum Beispiel, oder dass die Leuten sie bedauern und so weiter. Es war sehr interessant, wie die Leute auf die sehr simplen Muster dieses physischen Geschöpfes reagierten, das versucht zu laufen, aber erfolglos bleibt. Es gibt sich wirklich alle Mühe. Jedes Mal versuchten die Leute, ihm zu helfen. Der Maschine ist es egal, ob sie erfolglos ist oder ob irgendein Mensch ihr hilft. Allein dem Menschen gibt es etwas, diesem Ding zu helfen. Es ist aufschlussreich diese Mechanismen zu beobachten. Ich setze die Roboter auf die Straße und die Leute geben ihnen Geld. Sie geben das nicht als Unterstützung für die Roboter – das macht ja keinen Sinn. Sie geben ihnen Geld, weil sie sich dann besser fühlen.“5
Ein anderes Projekt, das uns mit unseren Verhaltensprägungen konfrontiert und unsere Mentalität verdeutlicht, insbesondere wenn es zur Interaktion zwischen Mensch und Computer kommt, ist die Installation Terrain (1993) von Ulrike Gabriel (D).6 In dieser interaktiven Arbeit wird künstliches Leben simuliert. Sie besteht aus einer begrenzten, halbkreisförmigen Arena (die an einen Mini-Autoscooter erinnert), in der eine Gruppe kleiner selbstfahrender Roboter lebt. Die Roboter sind mit Fotozellen und Sensoren ausgerüstet, die ihnen Bewegungsfreiheit gewähren und ihnen die Ortung von Bewegung und Position anderer ermöglichen. Ein Gehirnwellensensor, der auf dem Kopf eines in der Nähe der Arena sitzenden Teilnehmers angebracht wird, misst dessen Gehirnaktivität, die wiederum die Lichtintensität steuert. Je intensiver die Gehirnaktivitäten des Teilnehmers, desto weniger Licht fällt auf die Roboter und umso apathischer ist das Verhalten der Population; je schwächer die Gehirnaktivitäten sind (d.h. je weniger aufmerksam der Betrachter ist), umso chaotischer werden die Bewegungen der Roboterpopulation. Dieses kontraproduktive bzw. alogische Interaktionsszenario verwirrt den Teilnehmer und fördert neuartige, alternative oder improvisierte Interaktionsmuster.7
Diese künstlerischen Ansätze könnten als gegenläufig gesehen werden zu einer wissenschaftlichen Forschung, die auf das Verhalten eines Artefakts abzielt. Inzwischen leben wir unser digitales Leben und nutzen jeden Tag Anwendungen künstlicher Intelligenz und künstlichen Lebens, die auf Eingaben reagieren. Während MASS auf der bereits erwähnten Kunst- und Technologie-Tradition aufbaut und insbesondere auf aktuelle Onlinewelten wie Second Life, soziale Medien (z.B. Blogs, Wikis) oder Mehrspieler-Adventuregames verweist, unterscheidet es sich jedoch von diesen Typen weit verbreiteter Onlineanwendungen durch die Abwesenheit von spielerischen Elementen oder Konkurrenz. Soto und Petill bezeichnen die Figuren in ihrer virtuellen Welt als Avatare, aber diese sind nicht zu verwechseln mit dem Avatar, der das (idealisierte) Selbst repräsentiert. Das Aussehen der Avatare in MASS kann man als muskulös, ohne Geschlechtsmerkmale, knackig und „frisch aus dem 3-D Modellkatalog“ charakterisieren. Es gibt keine Mimik, was gemeinhin als „neutrales Aussehen“ gilt. Die Wesen agieren und bewegen sich auf expressive Art und Weise. Jedes Wesen spiegelt einen spezifischen emotionalen Zustand (basierend auf einem von drei definierten Charaktertypen: gewalttätig, passiv und irrational). Sein Agieren ist reaktiv, d.h. die Reaktionen werden durch Präsenz oder Bewegungen des Publikums ausgelöst. Mit Infrarotkameras aufgezeichnete Informationen über die räumliche Verteilung des Publikums rufen spezifische Avatare auf. Wir bemerken beispielsweise einen schüchternen Avatar, dessen Bewegungen und Ausdruck an ein leicht verängstigtes Tier erinnern, während andere, abhängig vom definierten Charakter, auf etwas anderes anspielen. Die kubusförmigen Grafiken, die sich im oberen Teil der virtuellen Umgebung befinden, veranschaulichen den Lernfortschritt eines jeden Avatars bezüglich seiner Autonomie. Diese Datenkuben repräsentieren somit die sukzessive Evolution der kollektiven Avatarpopulation. Präsenz, Aufmerksamkeit und Verhalten werden im MASS-Projekt zu Schlüsselelementen. MASS kehrt das oben beschriebene Zoo-Szenario insofern um, als dass das Publikum hier zum kollektiven Akteur wird.
1 http://www.scottpetill.com/#/mass/
2 Eine frühere Version der Installation wurde bei Impakt in Utrecht (NL) im Januar 2009 gezeigt.
3 Bert Haanstra (NL): Bij de Beesten af (Originaltitel). Ape and Super-Ape, DVD, EAN 8717344728263
4 Ortsbezogene Arbeiten, produziert durch die Teams von Patching Zone: http://cultuurlokaal.patchingzone.net/ (2008)
http://go-for-it.patchingzone.net/ (2009)
5 http://www.nettime.org/Lists-Archives/nettime-l-9710/msg00025....
6 Terrain wurde von Ulrike Gabriel in Zusammenarbeit mit Bob O’ Kane (USA) produziert.
7Eine ausführliche Projektbeschreibung ist abrufbar unter: http://www.medienkunstnetz.de/works/terrain/ und http://archive.v2.nl